Halo guys kita coba membuat robot sederhana dan ini tanpa programming, dan menggunakan bahan bekas, jadi tidak memerlukan biaya yang mahal. Kita buat robot seperti Hewan Kumbang (Kita beri nama Robot Kumbang).
 |
| Hasil Robot Kumbang, tetapi untuk model bisa kamu dekorasi sesuai keinginanmu |
Step 1 Menyiapkan Bahan dan Materi
- Dudukan baterai AA >> memegang baterai
- Beberapa kawat solder >> solder
- Beberapa kabel >> menghubungkan motor untuk beralih, dengan baterai
- 2 baterai AA >> menyalakan motor
- 2 1.5V motor (sebaiknya identik/sama) >> membuat robot bergerak
- Slide switch >> ON, OFF
- 2 SPDT (Kutub Tunggal Double Throw) switch >> digunakan untuk antena
- 1-2 penjepit kertas >> lem pada antena sehingga lebih panjang
- Beberapa lem >> digunakan dengan lem panas.
 |
| Bahan yang di butuhkan |
jangan terlalu dipikirkan untuk bahan, karena saya yakin kamu dapat temukan di mainan bekas atau sebuah radio.
Step 2 Siapkan Peralatan
- Pemotong kawat dan stripper >> kabel cut dan strip mereka
- Tang >> membentuk antena
- Lem panas >> lem saklar dan switch SPDT pada dudukan baterai
- Solder >> solder dan menghubungkan kabel
- Multimeter >> untuk memeriksa baterai
 |
| Peralatan yang kamu butuhkan |
Kamu dapat pinjam peralatan ayahmu.
Step 3 Kita mulai dengan mengecek
Cek baterai apakah masih dapat digunakan atau tidak, pastikan dapat digunakan.
Step 4 Set Kabel
Set dudukan kabel, jangan lupa ini "KONEKSI 3 KABEL"
 |
| Dudukan Baterai 3 Kabel |
Step 5 Pemasangan Antena
Tempelkan 2 SPDT Switches dengan lem panas di depan pemegang mencoba untuk melakukannya sesempurna mungkin, seperti gambar.
 |
| Tempelkan SPDT Switches seperti gambar |
Luruskan penjepit kertas, hingga berebentuk garis lurus, kemudian potong dengan pemotong kawat menjadi 2 bagian, lakukan dengan baik sesuaikan ukuran seimbang.
Lekukkan penjepit kertas yang sudah terbagi, seperti gambar. diusahakan sama agar seimbang.
 |
| Lekukkan penjepit kertas seperti di gambar |
Tempel dan Lem penjepit kertas itu di masing masing SPDT Switches bagian atas, seperti gambar.
 |
| Tempelkan penjepit kertas seperti gambar |
Step 6 Motor Penggerak
Tempelkan motor dengan sudut terbaik 40 derajat, atau setidaknya tidak terlalu jauh dari 40 derajat. Lakukan sebaik mungkin.
 |
| Pasang motor seperti di gambar |
Step 7 Sebuah Roda
Roda yang saya gunakan adalah roda dari mainan, mungkin sulit ditemukan di toko. Untuk roda tidak usah terlalu sama, gunakan alternatif lainya jika tidak ada.
Tempel dan Lem dibagian belakang seperti gambar.
 |
| Pasang roda seperti gambar |
Step 8 Susun Kabel dan Hubungkan
Hubungkan kabel dengan baik dan benar, jangan sampai salah kutup (+) dengan (-) agar tidak terjadi konsleting (hanya memboroskan energi).
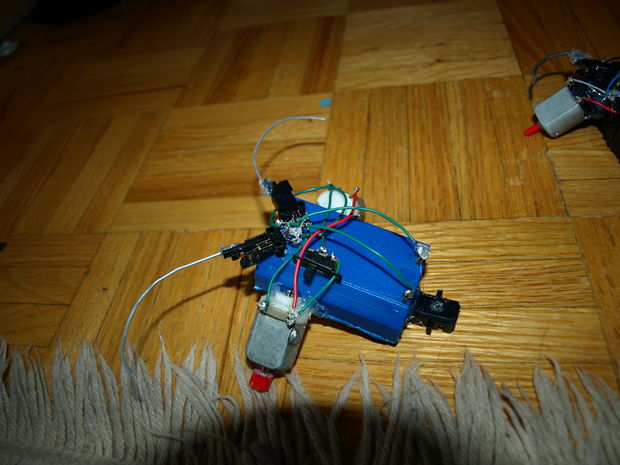
 |
| Susun kabel seperti gambar |
Step 9 Hias Robot
Step ini bersifat optional (tidak diharuskan), saya anjurkan untuk menghias sebaikdan sebagus yang anda inginkan.
Step 10 Cek kembali susunan kabel dan Skema Robot
Lihatlah dan perhatikan serta cek kembali.
 |
| Lihatlah skema robot |
Step 11 Bagaimana Alat Ini Bekerja
Ketika robot mengenai dinding atau rintangan, itu memicu saklar L (Kiri) atau R (Kanan) yang berbentuk antena, saat saklar tertekan maka motor berhenti dan lihatlah jika salah satu motor berhenti maka keseimbangan akan goyang dan itu membuat robot berpaling dari rintangan.
 |
| Silahkan lihat gambar yang dapat menjelaskan banyak hal |
Selesai dan Silahkan Dicoba.














Comments
Post a Comment
Silahkan komentar dengan baik